Krishna Murthy Jatavallabhula
World Models for Robots

I am an incoming assistant professor with the CS department at Johns Hopkins University, where I will direct the SciPhy lab.
I strive to build full-stack robotic systems that perceive, reason, and act with human-level efficiency, ultimately surpassing them. My work lies at the perception-action interface, tackling both how robots should represent the world around them, and how they use it for action.
Prior to this, I spent time as a research scientist at Meta’s robotics team, as a postdoc at MIT CSAIL and as a PhD candidate at Universite de Montreal. My work has been recognized with PhD fellowship awards from NVIDIA and Google, a best-paper award from IEEE RAL, and an induction to the RSS Pioneers 2020 cohort.
News
| Oct 19, 2025 | Announcing the SciPhy lab at Johns Hopkins University, starting Fall 2026. |
|---|---|
| Jun 12, 2025 | By Fall 2026, I will join the CS department at Johns Hopkins University as an assistant professor. |
| Sep 15, 2024 | I joined FAIR, Meta as an AI research scientist. |
| Sep 13, 2024 | I will serve as an area chair for CVPR 2025. |
| Sep 12, 2024 | I completed an eventful 2.5-year postdoc stint at MIT CSAIL. |
| May 31, 2024 | Serving as OpenReview chair for CoRL 2024 |
| Feb 29, 2024 | Speaking at the UMD/Microsoft future leaders in robotics and AI seminar series |
| Jan 28, 2024 | 6 papers accepted to ICRA 2024. |
| Jan 22, 2024 | Serving as associate editor for IROS and RA-L. |
| Sep 27, 2023 | Another webpage update, featuring new work, including ConceptGraphs. |
| Feb 11, 2023 | Long overdue webpage update, including the featured Conceptfusion work. |
| Mar 14, 2022 | I moved to MIT to start my potsdoc with Josh Tenenbaum and Antonio Torralba. |
| Mar 10, 2022 | Got my PhD with grade: exceptional! |
| Feb 1, 2022 | Serving as associate editor for IROS 2022 |
| Sep 14, 2021 | Organizing workshops Diff3D ICCV 2021, and the PRIBR at Neurips 2021. |
| Sep 4, 2021 | Teaching the realistic/advanced image synthesis class at McGill university (Fall 2021). |
| Jan 21, 2021 | Awarded a Google PhD fellowship (declined) |
| Dec 20, 2020 | Organizing the rethinking ML papers workshop at ICLR 2021 |
| Nov 30, 2020 | Honored to have received an NVIDIA graduate fellowship for 2021-22 |
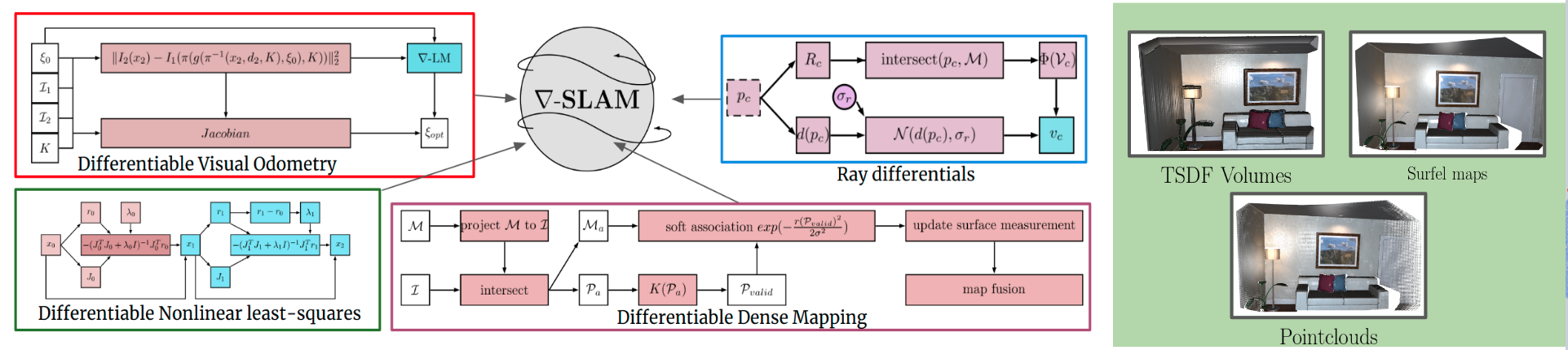
| Nov 9, 2020 | gradSLAM is available as an open-source PyTorch framework here |
| Sep 2, 2020 | Organizing the robot learning seminar series at Mila |
| Aug 31, 2020 | Organizing the differentiable vision, graphics, physics workshop at Neurips 2020 |
| Jul 5, 2020 | Selected to the RSS pioneers cohort for 2020 |
| Jun 4, 2020 | Our paper, MapLite, named best paper, IEEE RAL 2019. |
| Feb 11, 2020 | Our paper on fully differentiable dense SLAM will be (virtually) presented at ICRA 2020 |
| Nov 13, 2019 | Released NVIDIA Kaolin: a 3D deep learning library |